Protein Streak Seeding
Overview
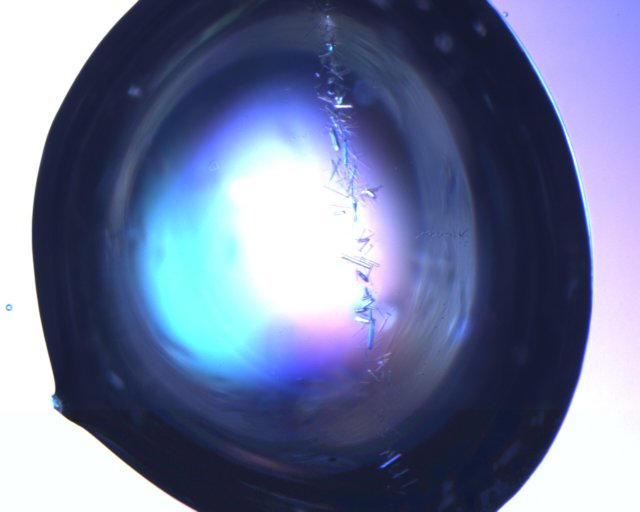
Fig.1: Streak seeded crystals
The motivation for this project, along with some background information, is described separately.
Task Description
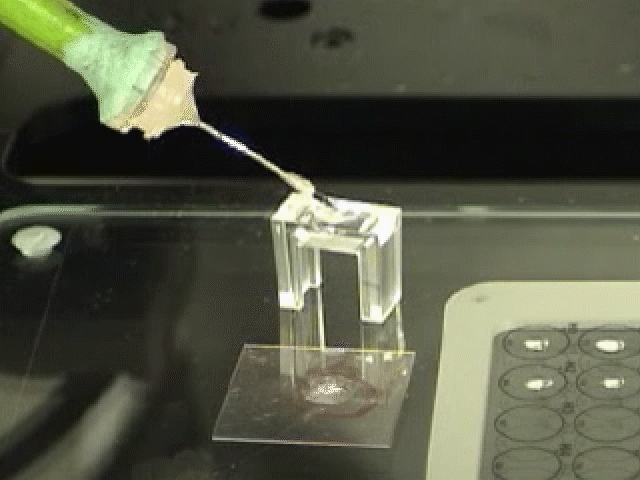
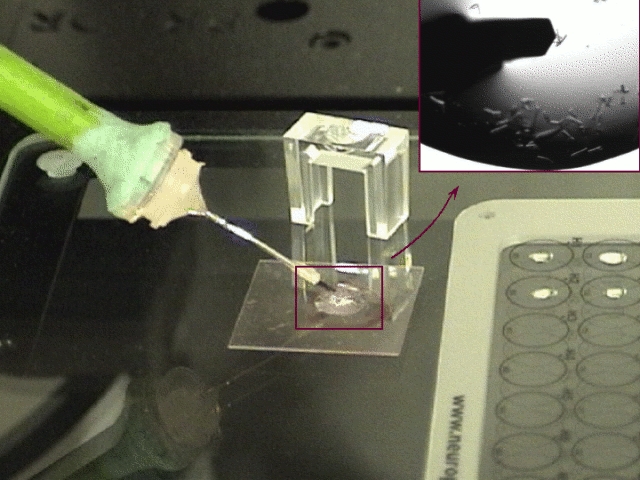
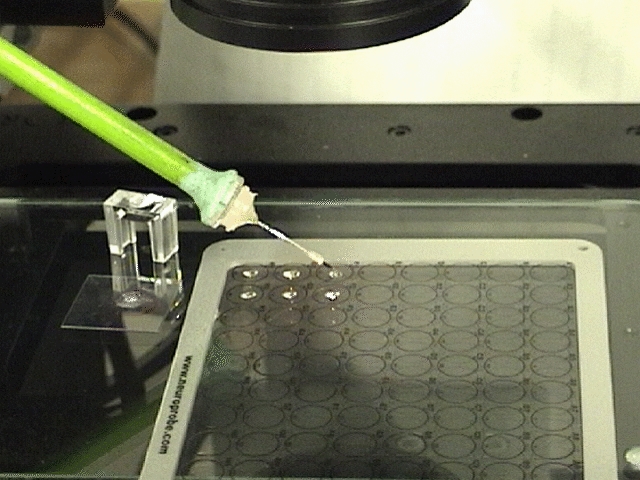
Fig.2: Wash, touch and streak
The task of streak seeding consists of three steps (Fig.2). First, the tool to be used is washed in clean water to remove any residue. Second, the tool is used to touch and probe the existing crystals thus breaking them up into fragments and picking some up. Third, the tool is streaked through the fresh mixture, which deposits some of the fragments in it. For this to work, the tool has to have the necessary properties to be able to break up, retain and release crystal fragments, thus the material it is made of is very important factor in for the efficiency of the procedure. Traditionally, various types of hair, bristles, whiskers or horse tail have been used.
CARESS: A Streak Seeding Robot

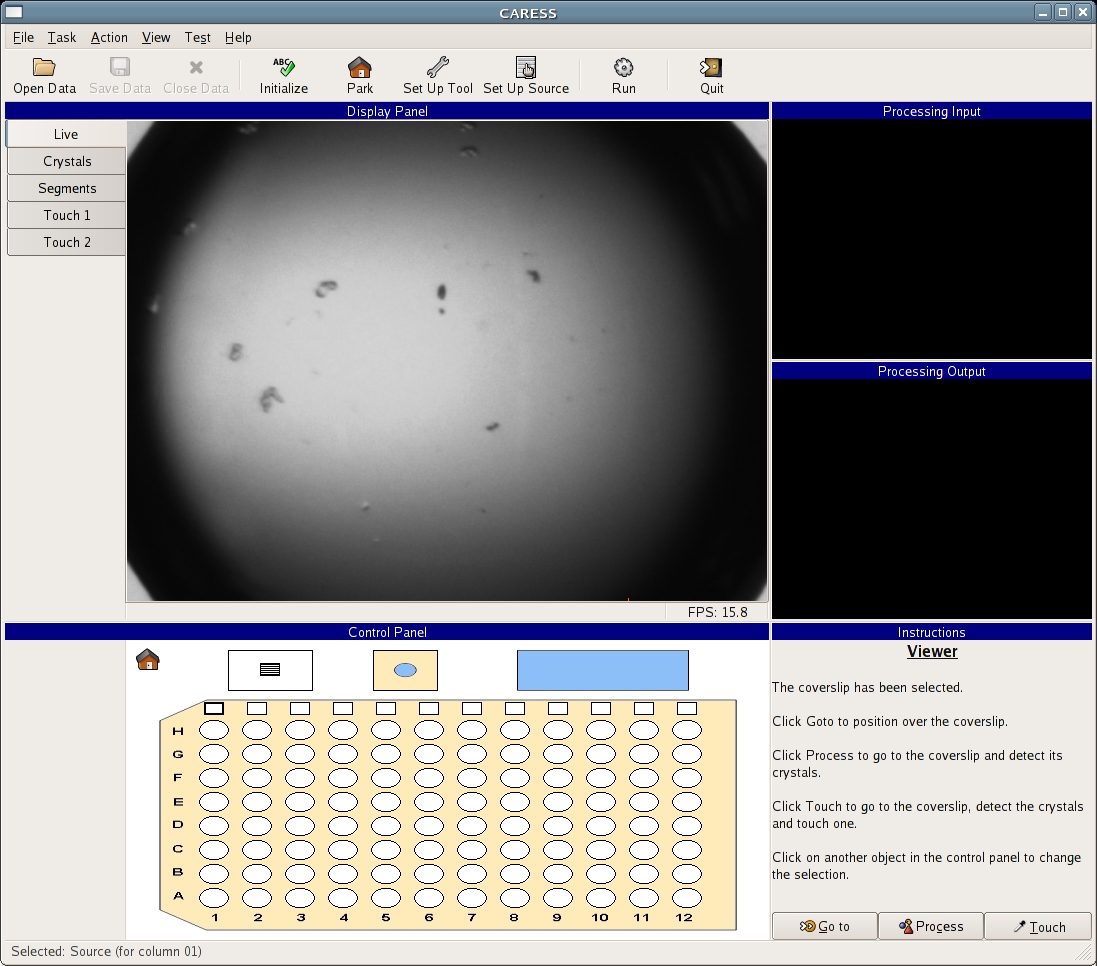

CARESS uses visual feedback from a camera mounted on a microscope to control a micromanipulator which has the mounting tool attached as its end-effector. All sensors and actuators are connected to a personal computer and controlled by an application running on it. The software is responsible for processing the visual stream from the camera using computer vision techniques to pinpoint the location of the objects of interest in the workspace, and for controlling the actuators accordingly. The user interacts with the application via a graphical interface to set the system up, execute tasks and view data.
The robot is designed to work with the hanging drop crystallization method, seeding from source crystals on a 21mm square coverslip to destination drops on a coversheet for a 96-well plate. The user sets up the system by placing on the stage the coverslip with the protein crystals, the coversheet of the 96-well plate with the target protein droplets, and a microbridge with water used for cleaning the seeding tool. Then the system is started and it performs the seeding autonomously. At top speed, one 96-well plate can be seeded in 5-6 minutes. The video in the side panel shows CARESS in operation.
Publications
-
Automated Streak Seeding With Micromachined Silicon
Tools
Acta Crystallographica Section D, Vol.62, 2006, pp.1039-1045
(with Sergey Vorobiev, William Edstrom, Ting Song, Andrew Laine, John Hunt and Peter K. Allen)
-
Streak Seeding Automation Using Silicon Tools
Technical Report CUCS-015-06, Columbia University, Computer Science Deptartment, 2006
(with Sergey Vorobiev, William Edstrom, Ting Song, Andrew Laine, John Hunt, and Peter Allen)
-
Microrobotic Streak Seeding For Protein Crystal
Growth
Robotics: Science and Systems Conference, Cambridge, MA, June 2005
(with Peter K. Allen, Ting Song, Andrew Laine, William Edstrom and John Hunt)
-
Robotic Protein Crystal Streak Seeding Using
Silicon Microtools
International Conference on Structural Genomics, Washington, DC, November 2004 (poster).
(with Peter K. Allen, William Edstrom, John Hunt, Ting Song and Andrew Laine)

