COMS E6733: 3D Photography

Team Name: TextureIt!
Team Members: Austin Reiter and Hao Dang
-
I.Project Description -
Build a 3D scanner capable of dense reconstruction of small objects.
Need to overcome the typical challenges of using cameras:
- correspondence problem
- how to deal with textureless regions?
- matching features from different viewpoints
-
II.Methods -
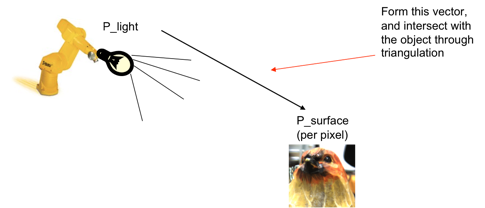
A. Photometric Stereo
- typically used to recover surface normals by varying the lighting conditions
- can we also recover 3D geometry (i.e., point clouds)?
- attach a light source to a robot arm and move to known positions
- image the object using a high-dynamic range camera
B. Two-camera stereo system with a laser pointer
- use a laser pointer to avoid having to match any features
- control the laser with a robot arm for fine movements and dense coverage of the object
III. Hardware -
2 Prosilica Gigabit Ethernet cameras with 25 mm lenses (image resolution of 1620x1220 pixels)
1 Point Grey Dragonly2 with two modes:
(1) High-dynamic range with 12 bits per pixel (image resolution 1024x768 pixels)
(2) RGB Color mode, 8 bits per pixel (image resolution 1024x768 pixels)
1 Simple laser pointer
1 Staubli Robot Arm (programmable through C++)
IV. Results -
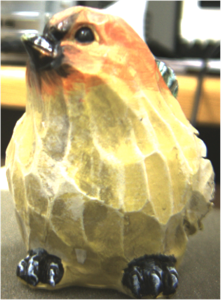
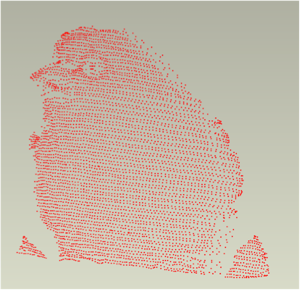
Scanning a small bird statue with method II-B:
Figure: (top-left) The texture color image of the bird statue, used for texture mapping the mesh. (top-right) The textured, triangulated mesh after reconstruction from the stereo system. (bottom) The raw point cloud obtained from the stereo system. These points are used to create a triangulated surface mesh which is then texture-mapped for photorealistic imagery.