Nearest Neighbor Search |
|||||||||
 |
|||||||||
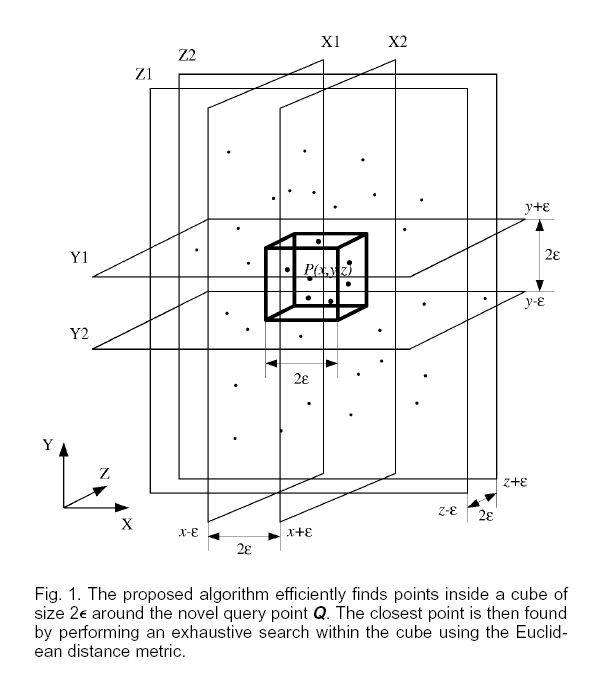
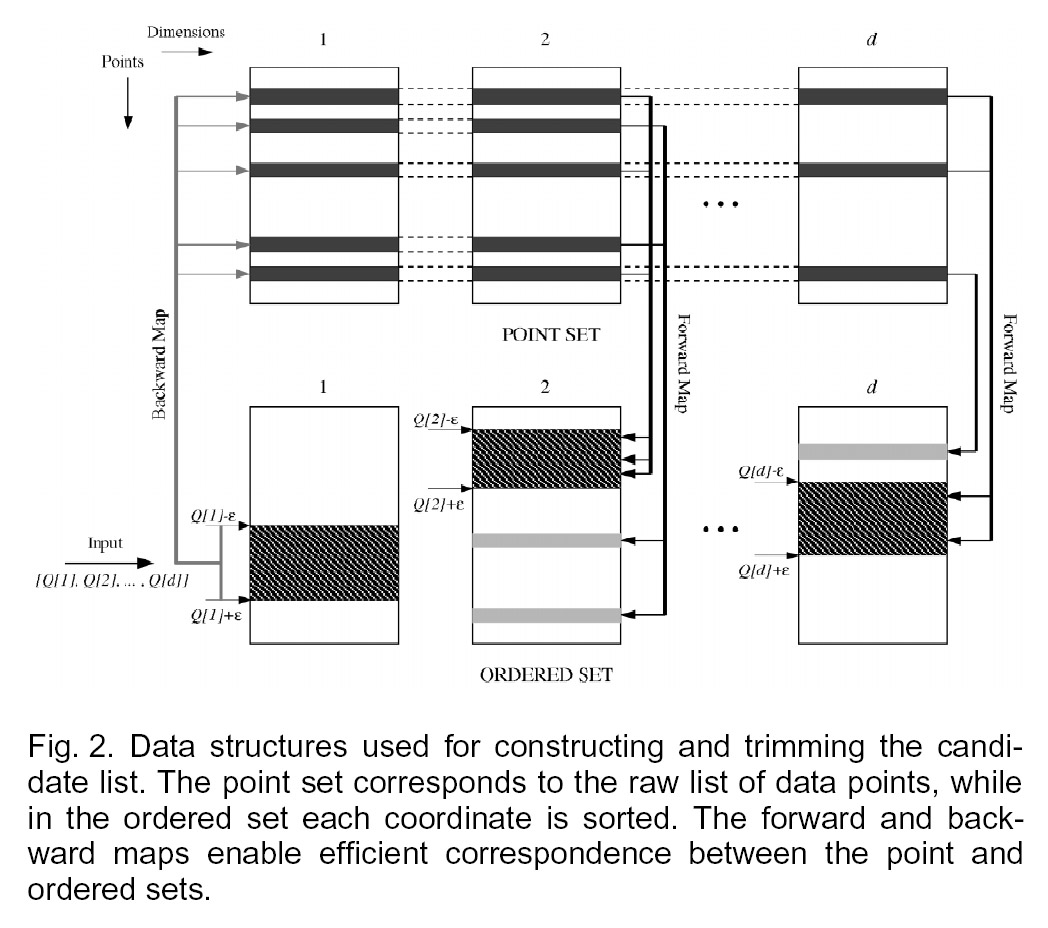
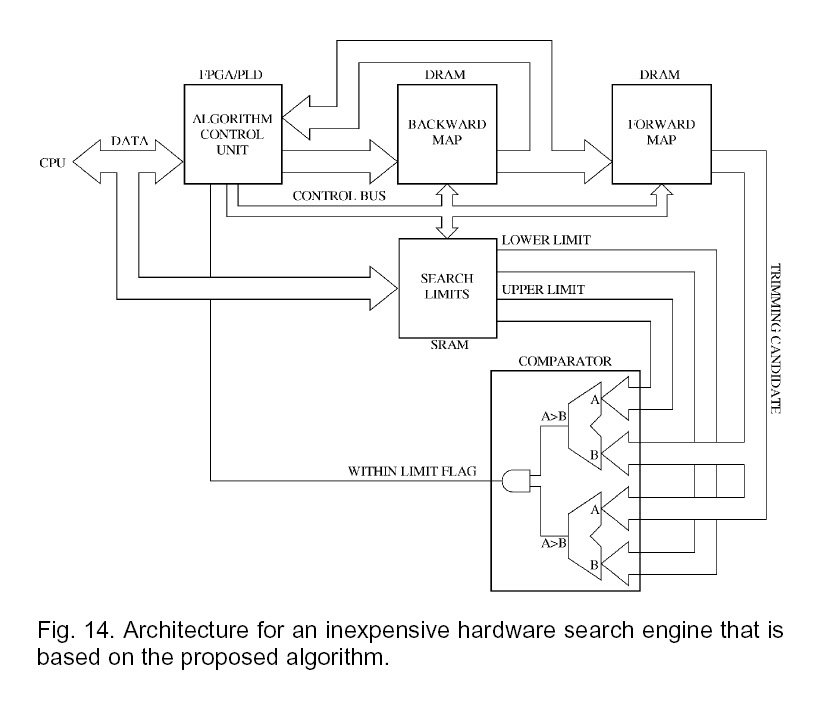
| The problem of finding the closest point in high-dimensional spaces is common in pattern recognition. Unfortunately, the complexity of most existing search algorithms, such as k-d tree and R-tree, grows exponentially with dimension, making them impractical for dimensionality above 15 or so. In nearly all applications, the closest point is of interest only if it lies within a user-specified distance e. We have developed a simple and practical algorithm to efficiently search for the nearest neighbor within Euclidean distance e. The use of projection search combined with a novel data structure dramatically improves performance in high dimensions. A complexity analysis has been done which aids in automatically determining e in structured problems. A comprehensive set of benchmarks clearly demonstrates the benefits of the proposed algorithm for a variety of structured and unstructured search problems. Object recognition by appearance matching is demonstrated as an example application. The simplicity of the algorithm makes it possible to construct an inexpensive hardware search engine which can be at least 100 times faster than its software equivalent. A C++ implementation of our algorithm has been made available. | |||||||||
Publicationsprint_paperentry_byid: more than 2 or no entry matches. |
|||||||||
Pictures
|
|||||||||
SoftwareNEARSEARCH: Nearest Neighbor Search |
|||||||||
Related ProjectsAppearance Matching |