|
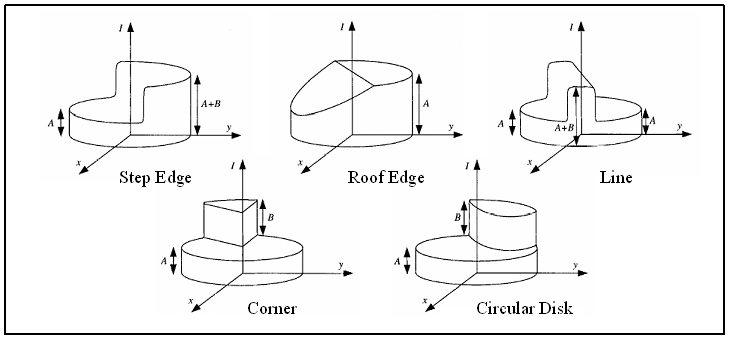
Most visual features are parametric in nature, including edges, lines, corners and junctions. We have developed an algorithm to automatically construct detectors for arbitrary parametric features. To maximize robustness we use realistic multi-parameter feature models and incorporate optical and sensing effects. Each feature is represented as a densely sampled parametric manifold in a low-dimensional subspace of a Hilbert space. During detection, the vector of intensity values in a window about each pixel in the image is projected into the subspace. If the projection lies sufficiently close to the feature manifold, the feature is detected and the location of the closest manifold point yields the feature parameters. The concepts of parameter reduction by normalization, dimension reduction, pattern rejection and heuristic search are all employed to achieve the required efficiency. Detectors have been constructed for five features, namely, step edge (five parameters), roof edge (five parameters), line (six parameters), corner (five parameters) and circular disc (six parameters).
|