Catadioptric Stereo: Planar and Curved Mirrors |
|||||||||||||||||||||
 |
|||||||||||||||||||||
|
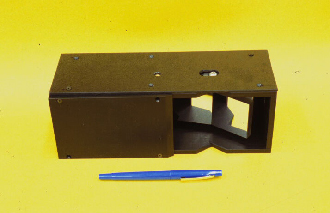
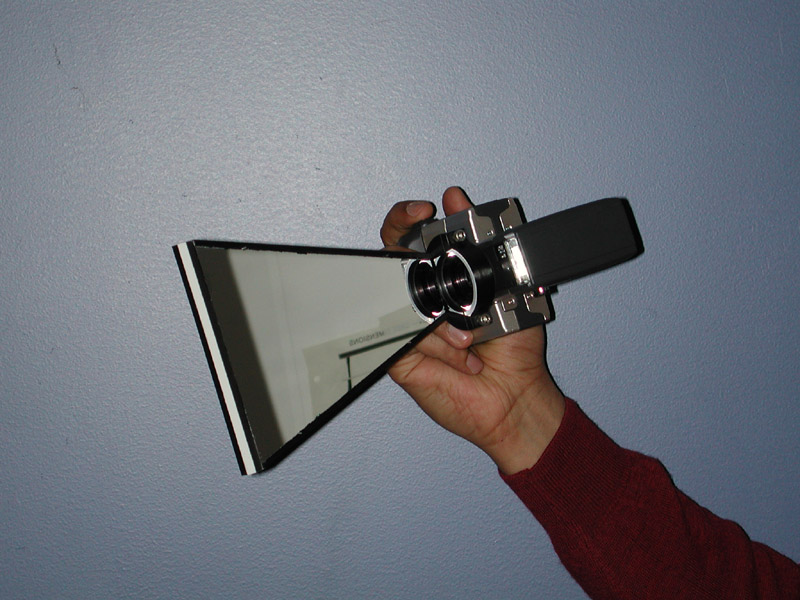
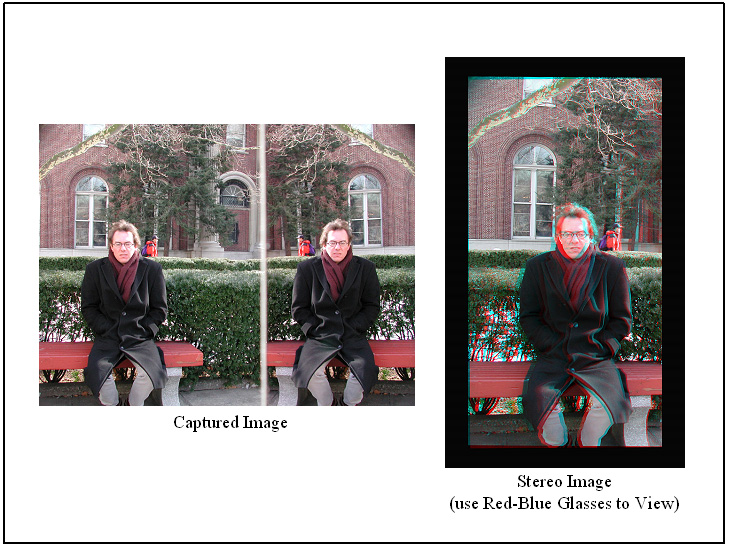
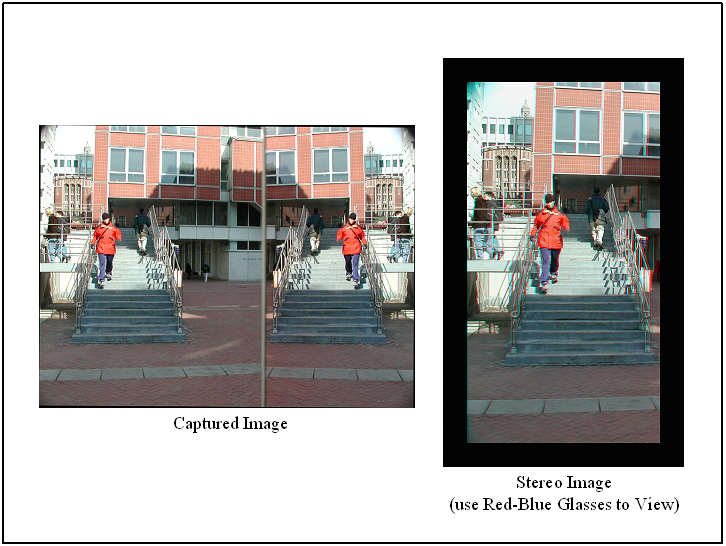
Conventional stereo uses two or more cameras to compute three-dimensional scene structure. Catadioptric stereo enables the capture of multiple views of a scene using a single camera. In this project, we are exploring the use of planar as well as curved mirrors to develop catadioptric stereo systems.
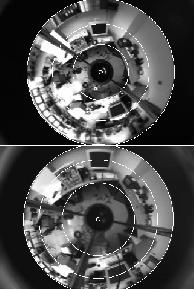
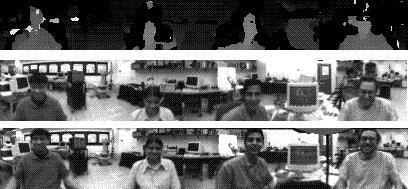
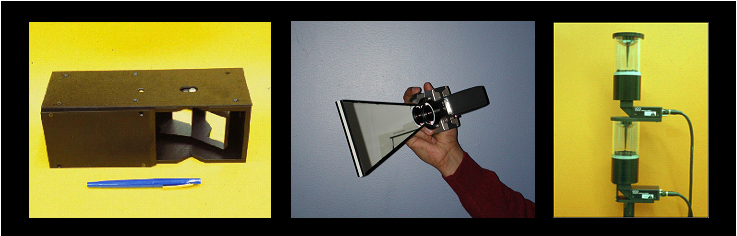
By placing planar mirrors in front of the camera, multiple virtual cameras are created. We have studied the geometric properties and self-calibration of planar catadioptric systems in detail. A couple of prototypes have been developed. In addition, a real-time stereo algorithm has been developed that computes depth maps at frame rate. The use of a single video camera ensures that the radiometric properties of both views of the scene are identical. This leads to more robust correspondence and hence depth estimation. Traditional stereo systems have small fields of view which limits their usefulness in some applications. We have developed a compact panoramic stereo camera that includes two panoramic sensors with aligned optical axes. Each panoramic sensor uses a parabolic mirror and a telecentric lens. A stereo algorithm has been developed that first maps the parabolic images to cylindrical panoramas. As a result, epipolar lines in both images are vertical scan lines. This naturally increases the efficiency of the stereo search algorithm. A stereo algorithm has been developed that produces panoramic depth video at frame-rate. We have also analyzed the epipolar geometries of a complete class of catadioptric stereo cameras that use mirrors with conic sections (hyperbolic, parabolic, ellipsoidal, conical). |
|||||||||||||||||||||
Publicationsprint_paperentry_byid: more than 2 or no entry matches. |
|||||||||||||||||||||
Pictures
|
|||||||||||||||||||||
Videos
|
|||||||||||||||||||||
Related ProjectsCatadioptric Cameras for 360 Degree Imaging |