|
Highlights of CSEE 4840 Embedded System Design
|
| Spring 2004
|
| Columbia University, Computer Engineering Program
|
| Prof. Stephen A. Edwards
|
The main focus of
CSEE 4840 Embedded System Design
is an independent
group project on the design and implementation of a small system
involving hardware and software. The students implemented the
projects on an FPGA board (the
XSB-300E) from
XESS Corporation.
This board contains a
Xilinx
Spartan IIE FPGA (an XC2S300E) capable of
holding both a 32-bit RISC microprocessor core (a ``Microblaze'') and
quite a lot of student-designed custom logic.
Virtually every project incorporated a combination of C code running
on the processor and custom logic written in the VHDL hardware
description language.
Below are selected projects from the spring 2004 course to give you an
idea of the breath and complexity of these projects. I must say, I
was very impressed with what these students could create in half a term.
 Terrormouse: A MIDI Synthesizer
Terrormouse: A MIDI Synthesizer
Gabriel Glaser Scott
Arfin Ron Weiss
Gabe, Scott, and Ron did a great job on this perfect example
of hardware/software codesign. They decoded the high-level MIDI
stream, which consists mostly of note on/note off events, in software
and used this information to control twelve oscillators, six based on
the Karplus-Strong string synthesis algorithm, the other six based on
FM synthesis. By changing the FM synthesis parameters, such as
modulation frequency and depth, they implemented ten different
``patches'' (sounds) ranging from a pure sinewave to a
metallic-sounding organ, all of which sounded very good.
 Their final report
Their final report
 Listen to their synthesizer
Listen to their synthesizer
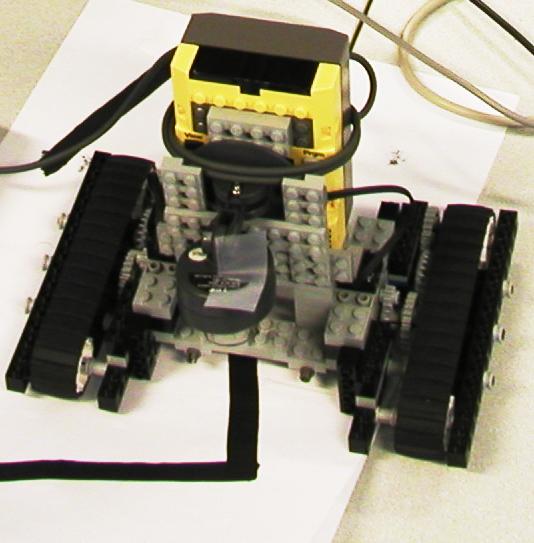
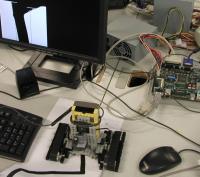 Muddrover: A line-following robot with video vision
Muddrover: A line-following robot with video vision
Akshay Kumar
Justin Titi
Athena Ledakis
Ron Coleman
Josef Bryks Schenker
This large group did one of the most ambitious projects, integrating a
Lego Mindstorms-based robot, a video camera, and custom hardware and
software to produce a robot that could run laps around a black line on
white paper. They took the raw video signal in through the Philips
SAA7019 video decoder chip on the XSB-300E board, processed it,
divided the screen into ninths, and used information about how much
black was in each area to decide whether to advance or turn the
robot. These commands were fed out a serial port to an IR tower to
control the Lego robot. Prof. Sklar lent the group the videocamera
and extensive advice.

Their final report
 Watch their robot in action (Quicktime .mov file)
Watch their robot in action (Quicktime .mov file)
 TAMF: Thing-a-ma-Flipper Video Effects Generator
TAMF: Thing-a-ma-Flipper Video Effects Generator
Essa Farhat
Eveliza Herrera
Rhonda Jordan
Amon Wilkes
This hard-working group produced a dynamic video effects generator.
Their hardware is able to scale and distort a still video image
stored in memory under software control. The result was a digital
fun-house mirror. They deserve extra credit for using a picture of
themselves as a sample and still being able to look at themselves at
the end of the term.

Their final report
Watch their video (Quicktime .mov file)
 DAQ-T: SAE Student Vehicle Telemetry System
DAQ-T: SAE Student Vehicle Telemetry System
Laxmikant Joshi
Sangeeta Das
Stephen Tarzia
Waclaw Aleksander Godycki
This unique project involved an unusual peripheral: a formula-style
racecar built with a space-frame chassis powered by a 600cc motorcycle
engine. Their goal was real-time remote data acquisition from the
car, letting them capture data such as engine RPM, throttle position, and
manifold air pressure from a safe, quiet, still location. They bought
an off-the-shelf RF transmitter/receiver pair, interfaced it with a
PIC microcontroller, and designed and built their own analog signal
conditioning hardware. Very impressive, although their car ran out of
gas during their demo, a challenge only this group could face.

Their final report
 SDE: Stereo Depth Extractor
SDE: Stereo Depth Extractor
Ang Cui
Jeng-Ming Hwang
Yen Yen Ooi
Kashif Siddiqui
Ting-Hsiang Wu
This group implemented an idea based on work by the CS Department's
Prof. Shree K. Nayar: extracting depth
information from a video camera pointed at a mirror (see his publications
page for details). They took the video from the camera, identified
two spots on the image, projected by a laser pointer onto a piece of
paper, and determined how far away the point was using parallax. They
revised their initial mirror configuration after reading Shree's paper
on the subject.
Their final report
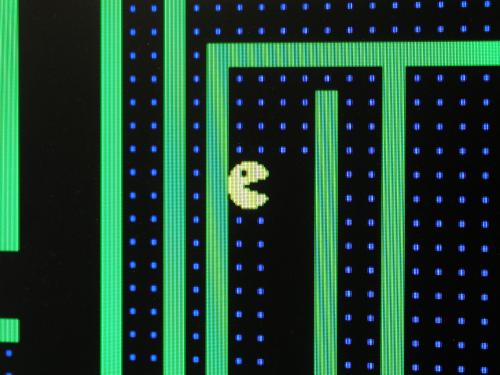
 Video Game
Video Game
Dagna Harasim
Charles Finkel
David Soofian
This group implemented a video game based very loosely on Pac-Man.
The display uses a combination of characters for the maze and sprites
for the characters. The game logic is implemented in C. They did a
good job, but I considered taking off a few points because I kept dying.
Their final report
Watch their game in action
 Video Game
Video Game
Ke Xu
Eric Li
Winston Chao
This group implemented a video game based very loosely on Pac-Man.
The display uses a combination of characters for the maze and sprites
for the characters. The game logic is implemented in C. They did a
good job, but I considered taking off a few points because I kept dying.
Their final report
Watch their game in action
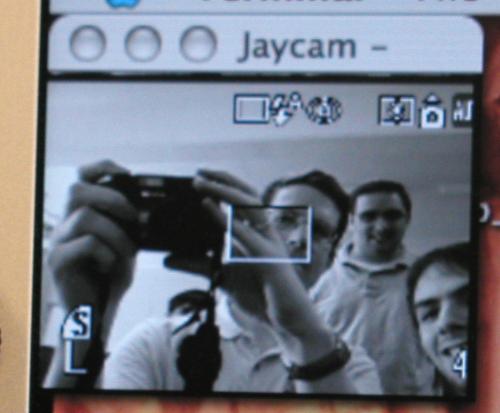
 JAYcam: Real-time video system
JAYcam: Real-time video system
Yaniv Schiller
Avrum Tilman
Joshua Weinberg
This group exemplified good engineering: their project appeared to not
be doing anything, but in fact was very complicated. It took
real-time black-and-white video, reduced its resolution, and
transmitted it over a 100 Mbit/s Ethernet link to a simple Java
program that displayed it on the screen. What was amazing about this
project was the number of different, complicated standards it
implemented: NTSC video, Ethernet, and UDP.

Their final report
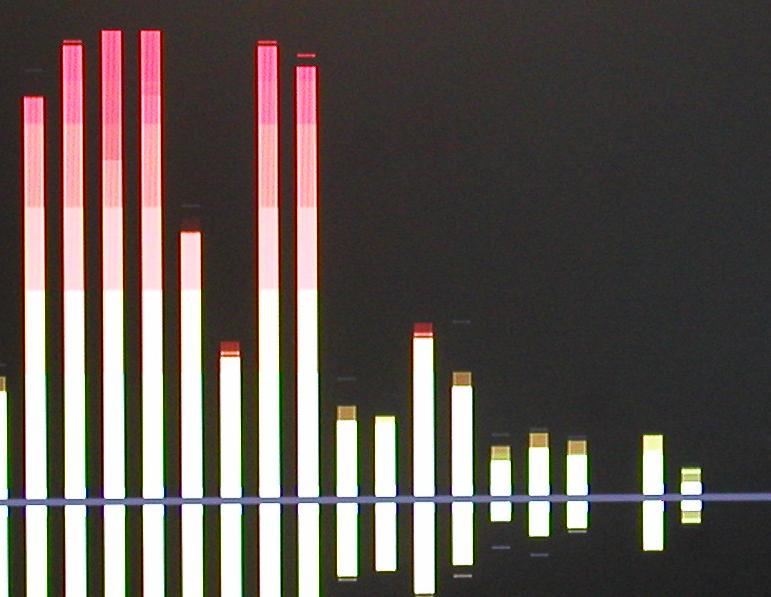
 NORTSAM: Real-time audio spectrum analyzer
NORTSAM: Real-time audio spectrum analyzer
Tecuan Flores
Joshua Mackler
Philip Coakley
This group really pushed the computing power of the XESS board. They
implemented a real-time graphical spectrum analyzer able perform a
real-time 2048-point fast Fourier transform (FFT) on a pair of 48 kHz
audio signals, bin the results, and display it graphically. Most of
the FFT was done in software, but they implemented a very fast complex
multiplier peripheral to speed up the inner loop.

Their final report
Watch their spectrum analyzer run