Simulations of
manipulation tasks performed by an anthropomorphic robotic hand
equipped with soft fingertips
|
As dynamic
simulation systems
become more accurate at modeling the real world, the number of possible
applications for such systems increases. One example is the dynamic
simulation of grasping and manipulation tasks, enabling interaction
with virtual objects. However, accurate grasping simulation requires
modeling subtle physical phenomena not taken into account by
traditional multi-rigid-body dynamic systems. Here we present examples
of simulated manipulation tasks using an analytical model for soft
fingertip contacts. This allows fingertips to apply frictional torque,
a key factor in the ability to create stable grasps using only two
fingers. Our approach also captures subtle phenomena, such as the
effect of local object geometry on the space of frictional forces that
can be applied at the contact, as well the coupling between tangential
force and frictional torque.
Simulation is performed at interactive rates, allowing the user to send
force control commands to the motors controlling the hand and also
change camera position during the simulation. These movies run at
approximately twice the speed of the actual simulation.
|
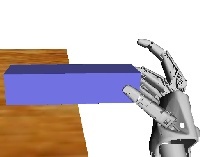
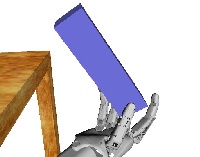
Stable
pinch grasp example
|
|
In this example, the hand
successfully picks up a rectangular object and holds it in a vertical
position. This is possible because the frictional forces applied at the
contacts are able to counter the effects of gravity. Since the grasped
object is locally planar, the fingertips create large contact areas
which helps increase the magnitude of frictional torque supported at
the contacts.
|
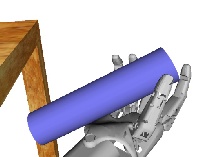
Unstable
pinch grasp example
|
|
The cylindrical object used in
this case has similar material properties (friction coefficient, mass,
inertia tensor) with the block used in the previous example, and the
fingertips are applying identical normal forces. However, local
curvature at the contact locations leads to smaller contact areas with
the fingers, which in turn limits the magnitude of frictional torque.
The fingers are unable to counter the effect of gravity, and the
cylinder rotates around the axis of the contacts, eventually falling
into the robotic palm.
|
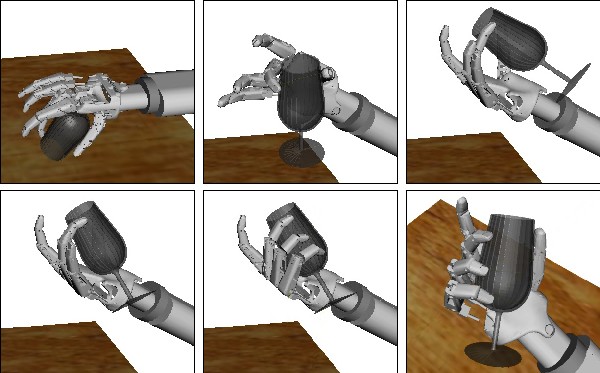
Complex
manipulation example
|
The goal of the simulated task
is to obtain a stable grasp of the glass-shaped object by using finger
contacts around its circumference as well as contacts on the palm.
However, in the initial position (top left image) the surface of the
table prevents the execution of such a grasp. We have simulated a
control algorithm that uses two fingers to pick up the object and
rotate it above the palm (top row). This is possible only in the
presence of frictional torque applied by soft finger contacts. With the
palm facing up (top right image), the force applied by the fingers is
decreased allowing the glass to rotate while maintaining contact with
the fingertips until it hits the rigid palm of the robot (bottom left
image). The ring and little finger can now be closed around the glass,
creating a stable grasp (bottom right image).
|
Note:
if you can not see these movies in your Media Player, try downloading
the DivX 6 codec from www.divx.com
|