AVENUE: Open Space Results
Trajectory Following
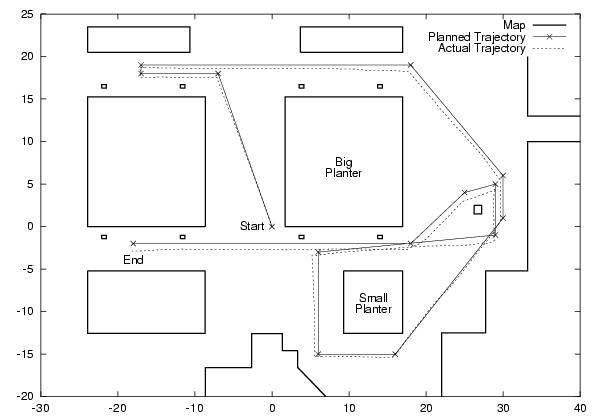
Fig.1: Trajectory 1 (units are meters)
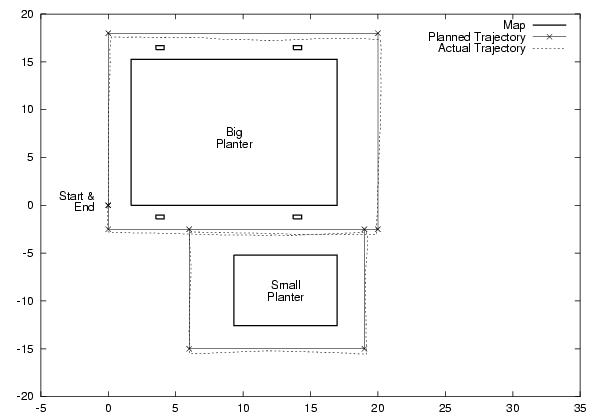
Fig.2: Trajectory 2: (units are meters)
The figures in the side panel show the results of two such runs. Experimental trajectory 1 was 210m long and contained 14 target waypoints. The average navigational error of the robot was 0.46m. The average error for experimental trajectory 2, which was 132m long and contained 9 waypoints, was 0.25m.
Return To Start
- 0.080m
- 0.334m
- 0.279m
Conclusions
The main factor which affects the accuracy of this method is the performance of the GPS as the only non-innertial sensor on our platform. If the robot is in a relatively open area so it can see enough satellites, then the system is capable of driving the robot with sufficient accuracy.
Due to the nature of the operating environment, however, very often nearby buildings obstruct large portions of the sky and the GPS performance degrades, sometimes to the point of generating no position fixes at all. In such cases, the only reasonable alternative is to seek additional localization data, such as the one provided by our visual localization method.

