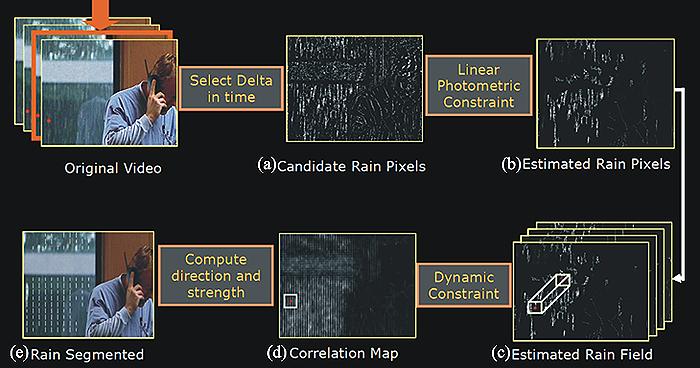
The figure shows some of the main steps of the detection algorithm. (a) Rain produces delta signal (unit frame width positive signal) at a pixel in time. We use this to identify candidate pixels that are effected by rain. Candidate rain pixels are shown in white. Note that there are several false positives (non-rain pixels). (b) We next apply the linear photometric constraint to streak intensities (see paper for details). This reduces false positives significantly to yield an estimate of the binary rain field b. (c) Then to segment rain region we compute the spatio-temporal correlation in the binary field b. (d) A correlation map is then computed using 11 × 11 neighborhoods over 30 frames. Pixels with high intensity values represent rain pixels while the non-rain pixels have low intensity values. (e) Needle map showing the segmentation of the scene into regions with and without rain. The needle map is kept sparse for clarity. Since we already know the pixels in the rain segmented region that are effected by rain, rain can be simply removed by estimating the background brightness from the neighboring time frames.