Radiometric Camera Calibration |
|||||||||||||||||||||
 |
|||||||||||||||||||||
|
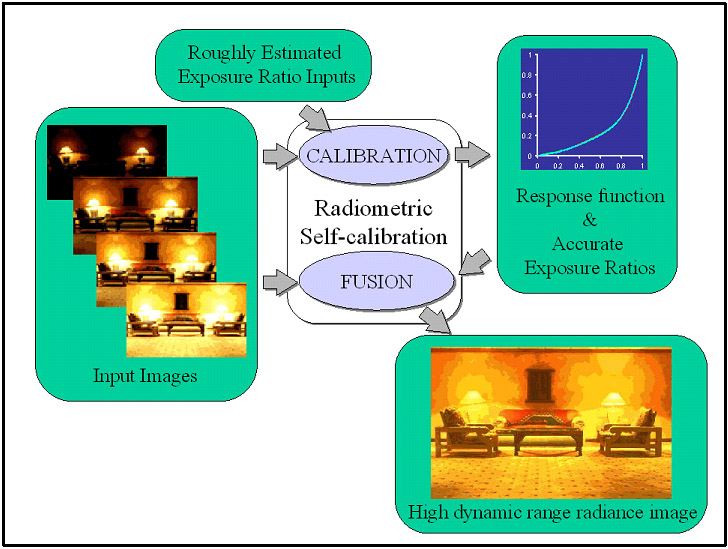
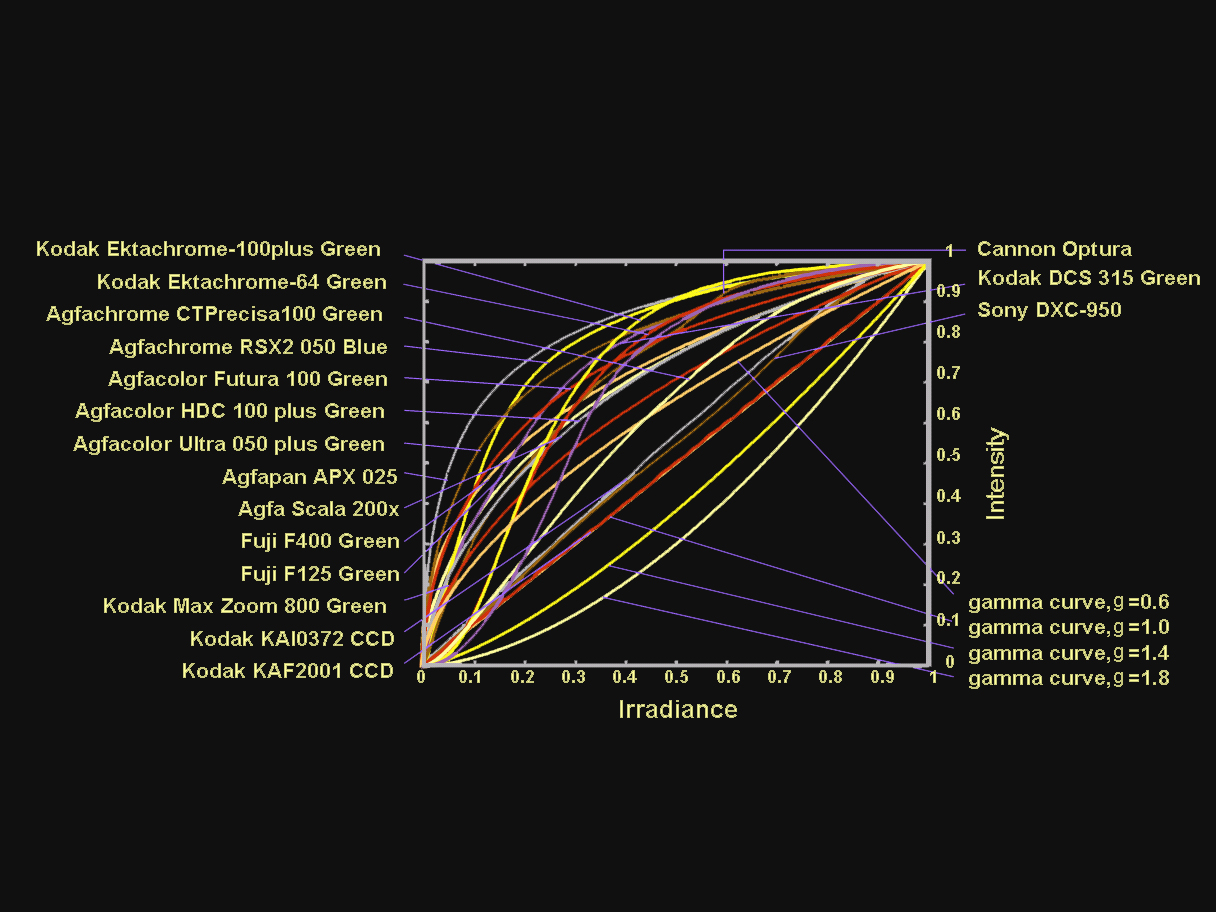
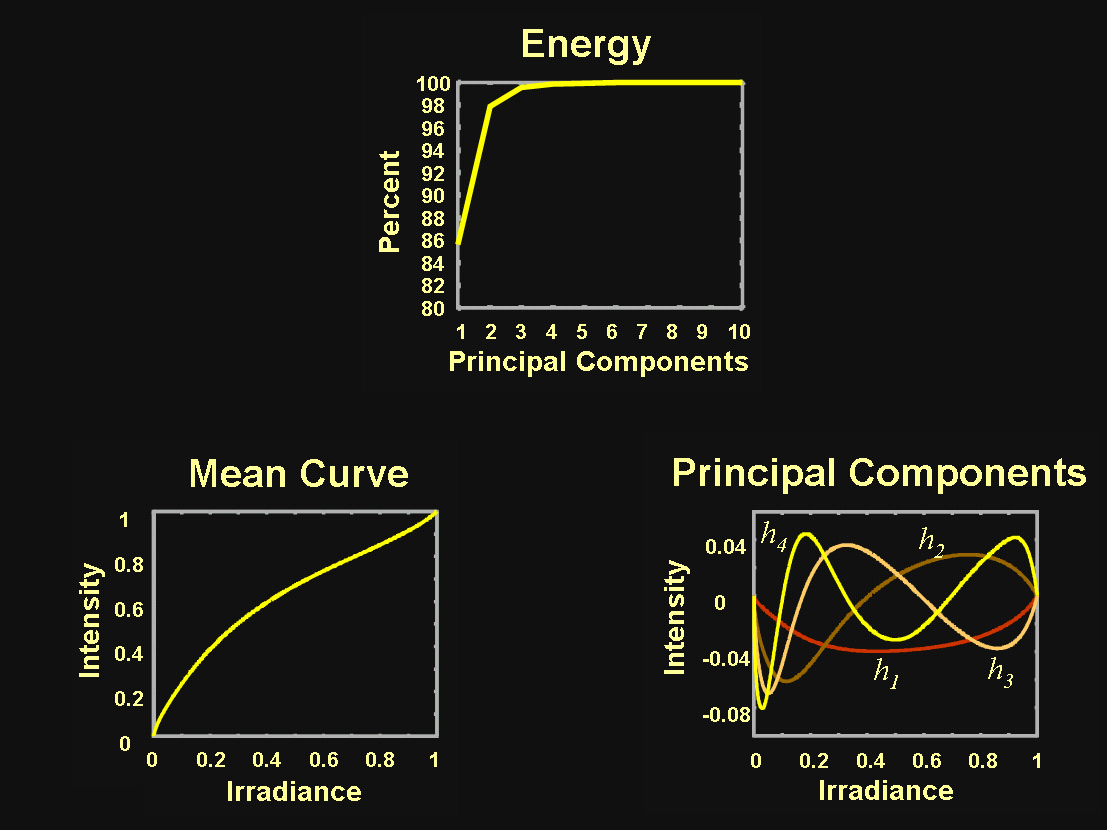
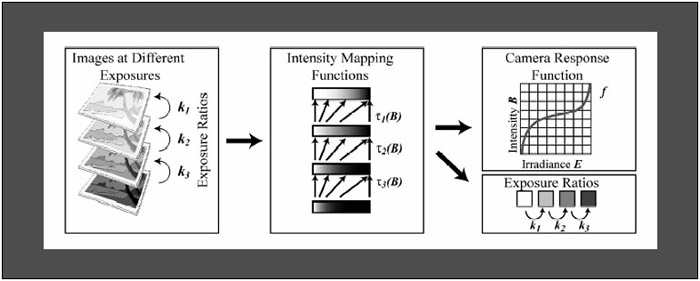
In this project, we have developed three algorithms for computing the response function of a camera from a set of images of a scene taken under different exposures. Our first algorithm (RASCAL) uses a low-order polynomial model for the camera response and can determine the response function without precise estimates for the exposure values used. We have also studied the space of camera response functions. We collected a very large database (DORF) of response functions of real-world imaging systems. After studying the redundancies within this database, we proposed an empirical linear model for camera response (EMOR). This model is computed from the DORF database and, with as few as 4 coefficients, is able accurately represent a very wide range of response functions encountered in practice. We have used this model to develop our second algorithm for computing response functions from images. The low dimensionality of the model enables the algorithm to estimate the response function of an imaging system from a sparse set of scene radiance values.
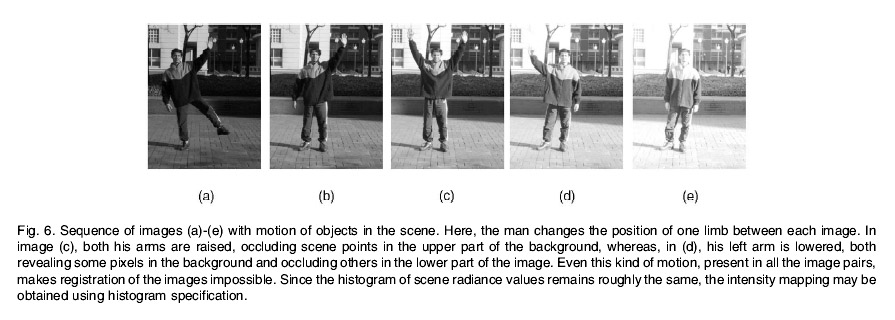
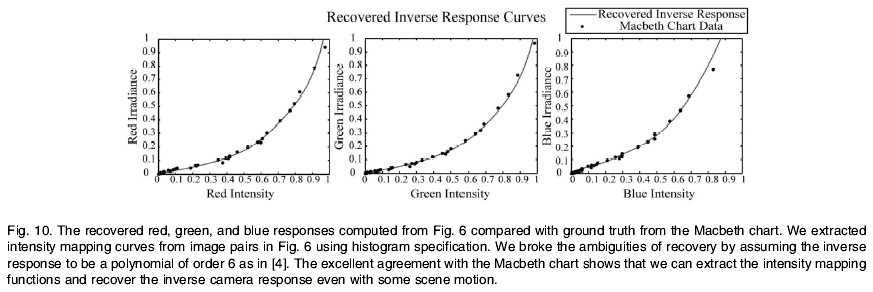
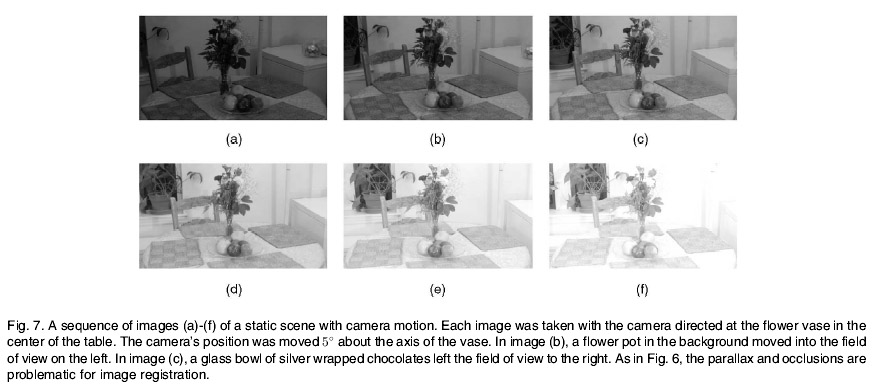
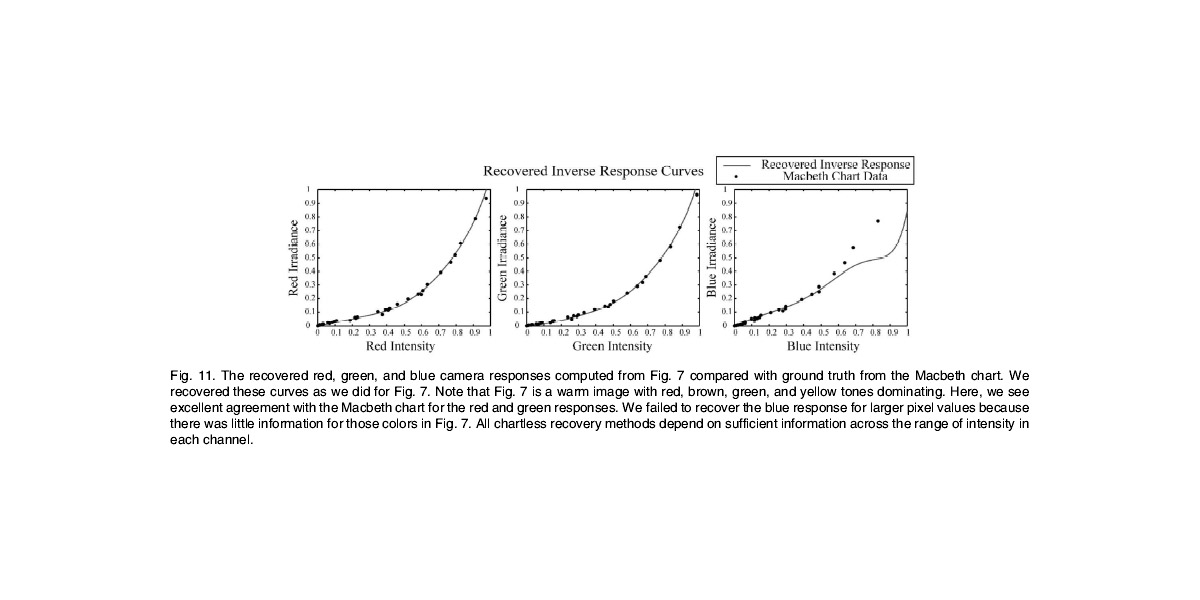
The above algorithms assume that the scene is static and that the images of the scene captured under different exposures can be registered. In other words, they require correspondence between brightness values in the different images. Our third algorithm addresses the problem of dynamic scenes where the images cannot be registered. It turns out that, in situations where the distribution of scene radiances remains almost constant between images, we can recover the response function even from images with scene and camera motion that cannot be registered. This algorithm is based on the observation that the response function can be computed directly from just histograms of the images taken under different exposures rather than corresponding brightness values in the multiple images. The EMOR camera response model and DORF camera response database were developed with Michael Grossberg at CCNY. They have been licensed by Adobe for use in the Photoshop family of products. |
|||||||||||||||||||||
Publicationsprint_paperentry_byid: more than 2 or no entry matches. |
|||||||||||||||||||||
Pictures
|
|||||||||||||||||||||
Slides |
|||||||||||||||||||||
Software and DatabaseRASCAL: Radiometric Self Calibration |
|||||||||||||||||||||
Related ProjectsHigh Dynamic Range Imaging: Assorted Pixels |